Полная механическая энергия математического маятника. Энергия колебательного движения
Механическая система, которая состоит из материальной точки (тела), висящей на нерастяжимой невесомой нити (ее масса ничтожно мала по сравнению с весом тела) в однородном поле тяжести, называется математическим маятником (другое название - осциллятор). Бывают и другие виды этого устройства. Вместо нити может быть использован невесомый стержень. Математический маятник может наглядно раскрыть суть многих интересных явлений. При малой амплитуде колебания его движение называется гармоническим.
Общие сведения о механической системе
Формула периода колебания этого маятника была выведена голландским ученым Гюйгенсом (1629-1695 гг.). Этот современник И. Ньютона очень увлекался данной механической системой. В 1656 г. он создал первые часы с маятниковым механизмом. Они измеряли время с исключительной для тех времен точностью. Это изобретение стало важнейшим этапом в развитии физических экспериментов и практической деятельности.
Если маятник находится в положении равновесия (висит отвесно), то будет уравновешиваться силой натяжения нити. Плоский маятник на нерастяжимой нити является системой с двумя степенями свободы со связью. При смене всего одного компонента меняются характеристики всех ее частей. Так, если нитку заменить на стержень, то у данной механической системы будет всего 1 степень свободы. Какими же свойствами обладает математический маятник? В этой простейшей системе под воздействием периодического возмущения возникает хаос. В том случае, когда точка подвеса не двигается, а совершает колебания, у маятника появляется новое положение равновесия. При быстрых колебаниях вверх-вниз эта механическая система приобретает устойчивое положение «вверх тормашками». У нее есть и свое название. Ее называют маятником Капицы.
Свойства маятника

Математический маятник имеет очень интересные свойства. Все они подтверждаются известными физическими законами. Период колебаний любого другого маятника зависит от разных обстоятельств, таких как размер и форма тела, расстояние между точкой подвеса и центром тяжести, распределение массы относительно данной точки. Именно поэтому определение периода висящего тела является довольно сложной задачей. Намного легче вычисляется период математического маятника, формула которого будет приведена ниже. В результате наблюдений над подобными механическими системами можно установить такие закономерности:
Если, сохраняя одинаковую длину маятника, подвешивать различные грузы, то период их колебаний получится одинаковым, хотя их массы будут сильно различаться. Следовательно, период такого маятника не зависит от массы груза.
Если при запуске системы отклонять маятник на не слишком большие, но разные углы, то он станет колебаться с одинаковым периодом, но по разным амплитудам. Пока отклонения от центра равновесия не слишком велики, колебания по своей форме будут достаточно близки гармоническим. Период такого маятника никак не зависит от колебательной амплитуды. Это свойство данной механической системы называется изохронизмом (в переводе с греческого «хронос» - время, «изос» - равный).
Период математического маятника
Этот показатель представляет собой период Несмотря на сложную формулировку, сам процесс очень прост. Если длина нити математического маятника L, а ускорение свободного падения g, то эта величина равна:
Период малых собственных колебаний ни в какой мере не зависит от массы маятника и амплитуды колебаний. В этом случае маятник двигается как математический с приведенной длиной.
Колебания математического маятника

Математический маятник совершает колебания, которые можно описать простым дифференциальным уравнением:
x + ω2 sin x = 0,
где х (t) - неизвестная функция (это угол отклонения от нижнего положения равновесия в момент t, выраженный в радианах); ω - положительная константа, которая определяется из параметров маятника (ω = √g/L, где g - это ускорение свободного падения, а L - длина математического маятника (подвес).
Уравнение малых колебаний вблизи положення равновесия (гармоническое уравнение) выглядит так:
x + ω2 sin x = 0
Колебательные движения маятника
Математический маятник, который совершает малые колебания, двигается по синусоиде. Дифференциальное уравнение второго порядка отвечает всем требованиям и параметрам такого движения. Для определения траектории необходимо задать скорость и координату, из которых потом определяются независимые константы:
x = A sin (θ 0 + ωt),
где θ 0 - начальная фаза, A - амплитуда колебания, ω - циклическая частота, определяемая из уравнения движения.
Математический маятник (формулы для больших амплитуд)
Данная механическая система, совершающая свои колебания со значительной амплитудой, подчиняется более сложным законам движения. Для такого маятника они рассчитываются по формуле:
sin x/2 = u * sn(ωt/u),
где sn - синус Якоби, который для u < 1 является периодической функцией, а при малых u он совпадает с простым тригонометрическим синусом. Значение u определяют следующим выражением:
u = (ε + ω2)/2ω2,
где ε = E/mL2 (mL2 - энергия маятника).
Определение периода колебания нелинейного маятника осуществляется по формуле:
где Ω = π/2 * ω/2K(u), K - эллиптический интеграл, π - 3,14.

Движение маятника по сепаратрисе
Сепаратрисой называют траекторию динамической системы, у которой двумерное фазовое пространство. Математический маятник движется по ней непериодически. В бесконечно дальнем моменте времени он падает из крайнего верхнего положения в сторону с нулевой скоростью, затем постепенно набирает ее. В конечном итоге он останавливается, вернувшись в исходное положение.
Если амплитуда колебаний маятника приближается к числу π , это говорит о том, что движение на фазовой плоскости приближается к сепаратрисе. В этом случае под действием малой вынуждающей периодической силы механическая система проявляет хаотическое поведение.
При отклонении математического маятника от положения равновесия с некоторым углом φ возникает касательная силы тяжести Fτ = -mg sin φ. Знак «минус» означает, что эта касательная составляющая направляется в противоположную от отклонения маятника сторону. При обозначении через x смещения маятника по дуге окружности с радиусом L его угловое смещение равняется φ = x/L. Второй закон предназначенный для проекций и силы, даст искомое значение:
mg τ = Fτ = -mg sin x/L
Исходя из этого соотношения, видно, что этот маятник представляет собой нелинейную систему, поскольку сила, которая стремится вернуть его в положение равновесия, всегда пропорциональна не смещению x, а sin x/L.
Только тогда, когда математический маятник осуществляет малые колебания, он является гармоническим осциллятором. Иными словами, он становится механической системой, способной выполнять гармонические колебания. Такое приближение практически справедливо для углов в 15-20°. Колебания маятника с большими амплитудами не является гармоническим.
Закон Ньютона для малых колебаний маятника

Если данная механическая система выполняет малые колебания, 2-й закон Ньютона будет выглядеть таким образом:
mg τ = Fτ = -m* g/L* x.
Исходя из этого, можно заключить, что математического маятника пропорционально его смещению со знаком «минус». Это и является условием, благодаря которому система становится гармоническим осциллятором. Модуль коэффициента пропорциональности между смещением и ускорением равняется квадрату круговой частоты:
ω02 = g/L; ω0 = √ g/L.
Эта формула отражает собственную частоту малых колебаний этого вида маятника. Исходя из этого,
T = 2π/ ω0 = 2π√ g/L.
Вычисления на основе закона сохранения энергии
Свойства маятника можно описать и при помощи закона сохранения энергии. При этом следует учитывать, что маятника в поле тяжести равняется:
E = mg∆h = mgL(1 - cos α) = mgL2sin2 α/2
Полная равняется кинетической или максимальной потенциальной: Epmax = Ekmsx = E
После того как будет записан закон сохранения энергии, берут производную от правой и левой частей уравнения:
Поскольку производная от постоянных величин равняется 0, то (Ep + Ek)" = 0. Производная суммы равняется сумме производных:
Ep" = (mg/L*x2/2)" = mg/2L*2x*x" = mg/L*v + Ek" = (mv2/2) = m/2(v2)" = m/2*2v*v" = mv* α,
следовательно:
Mg/L*xv + mva = v (mg/L*x + m α) = 0.
Исходя из последней формулы находим: α = - g/L*x.
Практическое применение математического маятника
Ускорение изменяется с географической широтой, поскольку плотность земной коры по всей планете не одинакова. Там, где залегают породы с большей плотностью, оно будет несколько выше. Ускорение математического маятника нередко применяют для геологоразведки. В его помощью ищут различные полезные ископаемые. Просто подсчитав количество колебаний маятника, можно обнаружить в недрах Земли каменный уголь или руду. Это связано с тем, что такие ископаемые имеют плотность и массу больше, чем лежащие под ними рыхлые горные породы.

Математическим маятником пользовались такие выдающиеся ученые, как Сократ, Аристотель, Платон, Плутарх, Архимед. Многие из них верили в то, что эта механическая система может влиять на судьбу и жизнь человека. Архимед использовал математический маятник при своих вычислениях. В наше время многие оккультисты и экстрасенсы пользуются этой механической системой для осуществления своих пророчеств или поиска пропавших людей.
Известный французский астроном и естествоиспытатель К. Фламмарион для своих исследований также использовал математический маятник. Он утверждал, что с его помощью ему удалось предсказать открытие новой планеты, появление Тунгусского метеорита и другие важные события. Во время Второй мировой войны в Германии (г. Берлин) работал специализированный Институт маятника. В наши дни подобными исследованиями занят Мюнхенский институт парапсихологии. Свою работу с маятником сотрудники этого заведения называют «радиэстезией».
ЦЕЛЬ: экспериментально проверить закон сохранения энергии поступательно-вращательного движения на маятнике Максвелла; определить скорость поступательного движения маятника по энергетическим и кинематическим соотношениям и сравнить их.
ОБОРУДОВАНИЕ: маятник Максвелла со сменными кольцами; электронный секундомер.
ОСНОВЫ ТЕОРИИ
Наиболее общей мерой движения материи является ее энергия. В механике это механическая энергия, соответствующая механическому движению тел. Различают два вида механической энергии: кинетическую и потенциальную.
Потенциальная энергия . Энергия, определяемаявзаимным расположением взаимодействующих тел и зависящая только от координат, называется потенциальной. РаботаА 12 , совершаемая консервативными силами при переводе системы из одного состояния в другое, равна убыли потенциальной энергии в этих состояниях.
А 12 = W 1 - W 2 , (1)
где W 1 иW 2 соответственно потенциальная энергия системы в состояниях 1 и 2.
Конкретный вид потенциальной энергии зависит от характера силового поля. В поле силы тяжести потенциальная энергия тела массы m имеет вид:
W = m·g·h , (2)
где g ускорение свободного падения;
h высота, отсчитанная от уровня, где потенциальная энергияW =0.
Кинетическая энергия . Это энергия, которой обладает тело (либо система тел) благодаря их движению. В случае, если тело движется поступательно со скоростьюv и одновременно вращается вокруг некоторой оси с угловой скоростью , то полная кинетическая энергия его движения равна:
где m масса тела;
I момент инерции.
Как видно, при вращательном движении роль линейной скорости играет угловая скорость, а роль массы момент инерции. Момент импульсаI зависит не только от массы, но и от распределения этой массы относительно оси вращения. ЗначениеI для некоторых тел правильной геометрической формы (длинный стержень, диск, шар, цилиндр) приведены в учебниках по курсу общей физики.
Закон сохранения энергии . Механическая энергия замкнутой системы тел, между которыми действуют консервативные силы остается постоянной. В таких системах при движении тела происходит превращение кинетической энергии в потенциальную и обратно, а полная энергия остается постоянной. (К консервативным силам относятся гравитационные, упругие, кулоновские и др.. Неконсервативными силами являются силы трения, сопротивления, неупругих деформаций.).
Механическая энергия сохраняется и в незамкнутых системах, если внешние силы не совершают работу, поскольку мерой измерения энергии является совершаемая работа.
МЕТОДИКА ЭКСПЕРИМЕНТА
Проверка закона сохранения энергии поступательно-вращательного движения тела выполняется на маятнике Максвелла. Маятник Максвелла это диск, закрепленный на оси. Ось, в свою очередь, подвешена на двух нитях, закрепленных верхними концами на кронштейнах.
Эти нити могут наматываться на ось, а при раскручивании их маятник совершает поступательно-вращательное движение, т.е. поднимается и опускается, вращаясь.
В процессе эксперимента выделены два основных состояния. В состоянии 1 маятник массой m находится на высотеh . Механическая энергия системы в этом состоянии равна только потенциальной энергии:
E 1 = W 1 = m·g·h. (4)
Отпустим маятник. Под действием равнодействующей сил тяжести и натяжения нити он начинает падать вниз (поступательное движение), а силы натяжения нитей приведут его во вращательное движение.

Рис. 1. Общий вид маятника Максвелла.
Т - сила натяжения нити;F g - сила тяжести.
В состоянии 2 маятник, опустившийся с высоты h , движется поступательно с скоростьюv, вращаясь при этом вокруг оси, проходящей через центр масс с угловой скоростью .Следовательно, механическая энергия системы в состоянии 2 складывается из кинетических энергий поступательного и вращательного движения:
 . (5)
. (5)
В выделенной системе (маятник в поле сил тяжести) должен выполняться закон сохранения энергии. Сила тяжести консервативная сила. Сила натяжения нити является внешней силой. но она не совершает работы, т.к. ее точка приложения при малом повороте маятника остается на месте. Следовательно:
 .
(6)
.
(6)
Скорость поступательного движения маятника связана с угловой скоростью соотношением
v = ·r, (7)
где r радиус оси маятника.
Тогда формула (6) примет вид:
2gh = v 2 (1+I/mr 2). (8)
А скорость поступательного движения маятника приобретает значение:
 .
(9)
.
(9)
Для проверки закона сохранения энергии вычислим скорость другим независимым способом, используя известные кинематические соотношения. Т. к. движение маятника является равноускоренным, то, если за время падения t маятник прошел путьh , его ускорение равно
a = 2h / t 2 . (10)
Отсюда скорость поступательного движения маятника в конце пути:
v = a t = 2h/t. (11)
Скорость в (9) зависит от момента инерции маятника, который можно изменять, устанавливая на диск различные кольца. Момент инерции маятника определяется как
I = I 0 + I Д + I К. (12)
где I 0 - момент инерции оси,
 - момент инерции диска,
- момент инерции диска,
 - момент инерции кольца,
- момент инерции кольца,
R Д , R К - радиусы диска и кольца.
Радиус кольца берется как среднее значение между внутренним и внешним радиусами. Так как радиус оси маятника значительно меньше радиуса диска, моментом инерции оси можно пренебречь.
Логическая схема метода.
Если скорость, определенная из закона сохранения энергии по соотношению (9) будет равна скорости, определенной кинематически по формуле (11), то это подтверждает сохранение энергии для выделенной системы.
ВЫПОЛНЕНИЕ РАБОТЫ
1. Измерьте время падения маятника с одним из колец, указанных преподавателем.
2. Повторите измерения 5-10 раз.
3. Измерьте высоту падения и высоту подъема маятника.
4. Измерьте штангенциркулем диаметр оси маятника, внутренний и внешний диаметр кольца.
ОБРАБОТКА РЕЗУЛЬТАТОВ
1. Вычислите среднее значение времени
падения
2. Рассчитайте скорость v 1 по соотношению (11).
3. Вычислите погрешность измерения скорости v 1 по правилу вычисления погрешности для косвенных измерений.
4. Вычислите момент инерции маятника с кольцом. Массы диска и кольца нанесены на них.
5. Вычислите скорость маятника v 2 по соотношению (9).
6. Определите меру несовпадения = ( v 1 - v 2 )/ v 1 и сравните с относительной погрешностью v 1 = v 1 / v 1 .
ДОПОЛНИТЕЛЬНОЕ ЗАДАНИЕ
Определите потери энергии по разности между высотой падения и последующей высотой подъема маятника.
Вычислите среднюю эффективную силу трения, создающую потери энергии.
КОНТОЛЬНЫЕ ВОПРОСЫ
1. Какие существуют виды механической энергии? Дайте их определения.
2. Сформулируйте закон сохранения механической энергии системы и условия его выполнения.
3. Опишите превращение энергии для маятника Максвелла.
4. Что такое момент инерции тела? Чему равен момент инерции диска, кольца?
5. Как определяется скорость поступательного движения маятника Максвелла?
10.4. Закон сохранения энергии при гармонических колебаниях
10.4.1. Сохранение энергии при механических гармонических колебаниях
Сохранение энергии при колебаниях математического маятника
При гармонических колебаниях полная механическая энергия системы сохраняется (остается постоянной).
Полная механическая энергия математического маятника
E = W k + W p ,
где W k - кинетическая энергия, W k = = mv 2 /2; W p - потенциальная энергия, W p = mgh ; m - масса груза; g - модуль ускорения свободного падения; v - модуль скорости груза; h - высота подъема груза над положением равновесия (рис. 10.15).
При гармонических колебаниях математический маятник проходит ряд последовательных состояний, поэтому целесообразно рассмотреть энергию математического маятника в трех положениях (см. рис. 10.15):
Рис. 10.15
1) в положении равновесия
потенциальная энергия равна нулю; полная энергия совпадает с максимальной кинетической энергией:
E = W k max ;
2) в крайнем положении (2 ) тело поднято над исходным уровнем на максимальную высоту h max , поэтому потенциальная энергия также максимальна:
W p max = m g h max ;
кинетическая энергия равна нулю; полная энергия совпадает с максимальной потенциальной энергией:
E = W p max ;
3) в промежуточном положении (3 ) тело обладает мгновенной скоростью v и поднято над исходным уровнем на некоторую высоту h , поэтому полная энергия представляет собой сумму
E = m v 2 2 + m g h ,
где mv 2 /2 - кинетическая энергия; mgh - потенциальная энергия; m - масса груза; g - модуль ускорения свободного падения; v - модуль скорости груза; h - высота подъема груза над положением равновесия.
При гармонических колебаниях математического маятника полная механическая энергия сохраняется:
E = const.
Значения полной энергии математического маятника в трех его положениях отражены в табл. 10.1.
| № | Положение | W p | W k | E = W p + W k |
|---|---|---|---|---|
| 1 | Равновесие | 0 | m v max 2 / 2 | m v max 2 / 2 |
| 2 | Крайнее | mgh max | 0 | mgh max |
| 3 | Промежуточное (мгновенное) | mgh | mv 2 /2 | mv 2 /2 + mgh |
Значения полной механической энергии, представленные в последнем столбце табл. 10.1, имеют равные значения для любых положений маятника, что является математическим выражением :
m v max 2 2 = m g h max ;
m v max 2 2 = m v 2 2 + m g h ;
m g h max = m v 2 2 + m g h ,
где m - масса груза; g - модуль ускорения свободного падения; v - модуль мгновенной скорости груза в положении 3 ; h - высота подъема груза над положением равновесия в положении 3 ; v max - модуль максимальной скорости груза в положении 1 ; h max - максимальная высота подъема груза над положением равновесия в положении 2 .
Угол отклонения нити математического маятника от вертикали (рис. 10.15) определяется выражением
cos α = l − h l = 1 − h l ,
где l - длина нити; h - высота подъема груза над положением равновесия.
Максимальный угол отклонения α max определяется максимальной высотой подъема груза над положением равновесия h max:
cos α max = 1 − h max l .
Пример 11. Период малых колебаний математического маятника равен 0,9 с. На какой максимальный угол от вертикали будет отклоняться нить, если, проходя положение равновесия, шарик движется со скоростью, равной 1,5 м/с? Трение в системе отсутствует.
Решение . На рисунке показаны два положения математического маятника:

- положение равновесия 1 (характеризуется максимальной скоростью шарика v max);
- крайнее положение 2 (характеризуется максимальной высотой подъема шарика h max над положением равновесия).
Искомый угол определяется равенством
cos α max = l − h max l = 1 − h max l ,
где l - длина нити маятника.
Максимальную высоту подъема шарика маятника над положением равновесия найдем из закона сохранения полной механической энергии.
Полная энергия маятника в положении равновесия и в крайнем положении определяется следующими формулами:
- в положении равновесия -
E 1 = m v max 2 2 ,
где m - масса шарика маятника; v max - модуль скорости шарика в положении равновесия (максимальная скорость), v max = 1,5 м/с;
- в крайнем положении -
E 2 = mgh max ,
где g - модуль ускорения свободного падения; h max - максимальная высота подъема шарика над положением равновесия.
Закон сохранения полной механической энергии:
m v max 2 2 = m g h max .
Выразим отсюда максимальную высоту подъема шарика над положением равновесия:
h max = v max 2 2 g .
Длину нити определим из формулы для периода колебаний математического маятника
T = 2 π l g ,
т.е. длина нити
l = T 2 g 4 π 2 .
Подставим h max и l в выражение для косинуса искомого угла:
cos α max = 1 − 2 π 2 v max 2 g 2 T 2
и произведем вычисление с учетом приблизительного равенства π 2 = 10:
cos α max = 1 − 2 ⋅ 10 ⋅ (1,5) 2 10 2 ⋅ (0,9) 2 = 0,5 .
Отсюда следует, что максимальный угол отклонения составляет 60°.
Строго говоря, при угле 60° колебания шарика не являются малыми и пользоваться стандартной формулой для периода колебаний математического маятника неправомерно.
Сохранение энергии при колебаниях пружинного маятника
Полная механическая энергия пружинного маятника складывается из кинетической энергии и потенциальной энергии:

E = W k + W p ,
где W k - кинетическая энергия, W k = mv 2 /2; W p - потенциальная энергия, W p = k (Δx ) 2 /2; m - масса груза; v - модуль скорости груза; k - коэффициент жесткости (упругости) пружины; Δx - деформация (растяжение или сжатие) пружины (рис. 10.16).
В Международной системе единиц энергия механической колебательной системы измеряется в джоулях (1 Дж).
При гармонических колебаниях пружинный маятник проходит ряд последовательных состояний, поэтому целесообразно рассмотреть энергию пружинного маятника в трех положениях (см. рис. 10.16):
1) в положении равновесия (1 ) скорость тела имеет максимальное значение v max , поэтому кинетическая энергия также максимальна:
W k max = m v max 2 2 ;
потенциальная энергия пружины равна нулю, так как пружина не деформирована; полная энергия совпадает с максимальной кинетической энергией:
E = W k max ;
2) в крайнем положении (2 ) пружина имеет максимальную деформацию (Δx max), поэтому потенциальная энергия также имеет максимальное значение:
W p max = k (Δ x max) 2 2 ;
кинетическая энергия тела равна нулю; полная энергия совпадает с максимальной потенциальной энергией:
E = W p max ;
3) в промежуточном положении (3 ) тело обладает мгновенной скоростью v , пружина имеет в этот момент некоторую деформацию (Δx ), поэтому полная энергия представляет собой сумму
E = m v 2 2 + k (Δ x) 2 2 ,
где mv 2 /2 - кинетическая энергия; k (Δx ) 2 /2 - потенциальная энергия; m - масса груза; v - модуль скорости груза; k - коэффициент жесткости (упругости) пружины; Δx - деформация (растяжение или сжатие) пружины.
При смещении груза пружинного маятника от положения равновесия на него действует возвращающая сила , проекция которой на направление движения маятника определяется формулой
F x = −kx ,
где x - смещение груза пружинного маятника от положения равновесия, x = ∆x , ∆x - деформация пружины; k - коэффициент жесткости (упругости) пружины маятника.
При гармонических колебаниях пружинного маятника полная механическая энергия сохраняется:
E = const.
Значения полной энергии пружинного маятника в трех его положениях отражены в табл. 10.2.
| № | Положение | W p | W k | E = W p + W k |
|---|---|---|---|---|
| 1 | Равновесие | 0 | m v max 2 / 2 | m v max 2 / 2 |
| 2 | Крайнее | k (Δx max) 2 /2 | 0 | k (Δx max) 2 /2 |
| 3 | Промежуточное (мгновенное) | k (Δx ) 2 /2 | mv 2 /2 | mv 2 /2 + k (Δx ) 2 /2 |
Значения полной механической энергии, представленные в последнем столбце таблицы, имеют равные значения для любых положений маятника, что является математическим выражением закона сохранения полной механической энергии :
m v max 2 2 = k (Δ x max) 2 2 ;
m v max 2 2 = m v 2 2 + k (Δ x) 2 2 ;
k (Δ x max) 2 2 = m v 2 2 + k (Δ x) 2 2 ,
где m - масса груза; v - модуль мгновенной скорости груза в положении 3 ; Δx - деформация (растяжение или сжатие) пружины в положении 3 ; v max - модуль максимальной скорости груза в положении 1 ; Δx max - максимальная деформация (растяжение или сжатие) пружины в положении 2 .
Пример 12. Пружинный маятник совершает гармонические колебания. Во сколько раз его кинетическая энергия больше потенциальной в тот момент, когда смещение тела из положения равновесия составляет четверть амплитуды?
Решение . Сравним два положения пружинного маятника:
- крайнее положение 1 (характеризуется максимальным смещением груза маятника от положения равновесия x max);
- промежуточное положение 2 (характеризуется промежуточными значениями смещения от положения равновесия x и скорости v →).
Полная энергия маятника в крайнем и промежуточном положениях определяется следующими формулами:
- в крайнем положении -
E 1 = k (Δ x max) 2 2 ,
где k - коэффициент жесткости (упругости) пружины; ∆x max - амплитуда колебаний (максимальное смещение от положения равновесия), ∆x max = A ;
- в промежуточном положении -
E 2 = k (Δ x) 2 2 + m v 2 2 ,
где m - масса груза маятника; ∆x - смещение груза от положения равновесия, ∆x = A /4.
Закон сохранения полной механической энергии для пружинного маятника имеет следующий вид:
k (Δ x max) 2 2 = k (Δ x) 2 2 + m v 2 2 .
Разделим обе части записанного равенства на k (∆x ) 2 /2:
(Δ x max Δ x) 2 = 1 + m v 2 2 ⋅ 2 k Δ x 2 = 1 + W k W p ,
где W k - кинетическая энергия маятника в промежуточном положении, W k = mv 2 /2; W p - потенциальная энергия маятника в промежуточном положении, W p = k (∆x ) 2 /2.
Выразим из уравнения искомое отношение энергий:
W k W p = (Δ x max Δ x) 2 − 1
и рассчитаем его значение:
W k W p = (A A / 4) 2 − 1 = 16 − 1 = 15 .
В указанный момент времени отношение кинетической и потенциальной энергий маятника равно 15.
В технике и окружающем нас мире часто приходится сталкиваться с периодическими (или почти периодическими ) процессами, которые повторяются через одинаковые промежутки времени. Такие процессы называют колебательными .
Колебания – один из самых распространенных процессов в природе и технике. Крылья насекомых и птиц в полете, высотные здания и высоковольтные провода под действием ветра, маятник заведенных часов и автомобиль на рессорах во время движения, уровень реки в течение года и температура человеческого тела при болезни, звук - это колебания плотности и давления воздуха, радиоволны - периодические изменения напряженностей электрического и магнитного полей, видимый свет - тоже электромагнитные колебания, только с несколько иными длиной волны и частотой, землетрясения - колебания почвы, биение пульса - периодические сокращения сердечной мышцы человека и т.д.
Колебания бывают механические, электромагнитные, химические, термодинамические и различные другие. Несмотря на такое разнообразие, все они имеют между собой много общего.
Колебательные явления различной физической природы подчиняются общим закономерностям. Например, колебания тока в электрической цепи и колебания математического маятника могут описываться одинаковыми уравнениями. Общность колебательных закономерностей позволяет рассматривать колебательные процессы различной природы с единой точки зрения. Признаком колебательного движения является его периодичность .
Механические колебания – это движения, которые точно или приблизительно повторяются через одинаковые промежутки времени .
Примерами простых колебательных систем могут служить груз на пружине (пружинный маятник) или шарик на нити (математический маятник).


При механических колебаниях кинетическая и потенциальная энергии периодически изменяются.
При максимальном отклонении тела от положения равновесия его скорость, а следовательно, и кинетическая энергия обращаются в нуль . В этом положении потенциальная энергия колеблющегося тела достигает максимального значения . Для груза на пружине потенциальная энергия – это энергия упругих деформаций пружины. Для математического маятника – это энергия в поле тяготения Земли.
Когда тело при своем движении проходит через положение равновесия , его скорость максимальна. Тело проскакивает положение равновесия по закону инерции. В этот момент оно обладает максимальной кинетической и минимальной потенциальной энергией . Увеличение кинетической энергии происходит за счет уменьшения потенциальной энергии.
При дальнейшем движении начинает увеличиваться потенциальная энергия за счет убыли кинетической энергии и т. д.
Таким образом, при гармонических колебаниях происходит периодическое превращение кинетической энергии в потенциальную и наоборот .
Если в колебательной системе отсутствует трение, то полная механическая энергия при механических колебаниях остается неизменной.
Для груза на пружине :
![]()
В положении максимального отклонения полная энергия мятника равна потенциальной энергии деформированной пружины:
При прохождении положения равновесия полная энергия равна кинетической энергии груза:

Для малых колебаний математического маятника :

В положении максимального отклонения полная энергия мятника равна потенциальной энергии поднятого на высоту h тела:

При прохождении положения равновесия полная энергия равна кинетической энергии тела:

Здесь h m – максимальная высота подъема маятника в поле тяготения Земли, x m и υ m = ω 0 x m – максимальные значения отклонения маятника от положения равновесия и его скорости.
Гармонические колебания и их характеристики. Уравнение гармонического колебания.
Простейшим видом колебательного процесса являются простые гармонические колебания , которые описываются уравнением
x = x m cos (ωt + φ 0).
Здесь x
– смещение тела от положения равновесия,
x m
– амплитуда колебаний, то есть максимальное смещение от положения равновесия,
ω – циклическая или круговая частота
колебаний,
t
– время.
Характеристики колебательного движения.
Смещение х – отклонение колеблющейся точки от положения равновесия. Единица измерения – 1 метр.
Амплитуда колебаний А – максимальноеотклонение колеблющейся точки от положения равновесия. Единица измерения – 1 метр.
Период колебаний T – минимальный интервал времени, за который происходит одно полное колебание, называется. Единица измерения – 1 секунда.
T=t/N
где t - время колебаний, N - количество колебаний, совершенных за это время.
По графику гармоническихколебаний можно определить период и амплитуду колебаний:

Частота колебаний ν – физическая величина, равная числу колебаний за единицу времени.
ν=N/t
Частота – величина, обратная периоду колебаний:
Частота колебаний ν показывает, сколько колебаний совершается за 1 с.Единица частоты – герц (Гц).
Циклическая частота ω – число колебаний за 2π секунды.
Частота колебаний ν связана с циклической частотой ω и периодом колебаний T соотношениями:
Фаза гармонического процесса – величина, стоящая под знаком синуса или косинуса в уравнении гармонических колебаний φ = ωt + φ 0 . При t = 0 φ = φ 0 , поэтому φ 0 называют начальной фазой .
График гармонических колебаний представляет собой синусоиду или косинусоиду.
Во всех трех случаях для синих кривых φ 0 = 0:

только большей амплитудой (x" m > x m);

красная кривая отличается от синей только значением периода (T" = T / 2);

красная кривая отличается от синей только значением начальной фазы (рад).
При колебательном движении тела вдоль прямой линии (ось OX ) вектор скорости направлен всегда вдоль этой прямой. Скорость движения тела определяется выражением
![]()
В математике процедура нахождения предела отношения Δх/Δt при Δt → 0 называется вычислением производной функции x (t ) по времени t и обозначается как x" (t ).Скорость равна производной функции х(t ) по времени t.
Для гармонического закона движения x = x m cos (ωt + φ 0) вычисление производной приводит к следующему результату:
υ х =x" (t )= ωx m sin (ωt + φ 0)
Аналогичным образом определяется ускорение a x тела при гармонических колебаниях. Ускорение a равно производной функции υ(t ) по времени t , или второй производной функции x (t ). Вычисления дают:
а х =υ х "(t) =x"" (t )= -ω 2 x m cos (ωt + φ 0)=-ω 2 x
Знак минус в этом выражении означает, что ускорение a (t ) всегда имеет знак, противоположный знаку смещения x (t ), и, следовательно, по второму закону Ньютона сила, заставляющая тело совершать гармонические колебания, направлена всегда в сторону положения равновесия (x = 0).
На рисунке приведены графики координаты, скорости и ускорения тела, совершающего гармонические колебания.

Графики координаты x(t), скорости υ(t) и ускорения a(t) тела, совершающего гармонические колебания.
Пружинный маятник.
Пружинным маятником называют груз некоторой массы m, прикрепленный к пружине жесткости k, второй конец которой закреплен неподвижно .
Собственная частота ω 0 свободных колебаний груза на пружине находится по формуле:
Период T гармонических колебаний груза на пружине равен

Значит, период колебаний пружинного маятника зависит от массы груза и от жесткости пружины.
Физические свойства колебательной системы определяют только собственную частоту колебаний ω 0 и период T . Такие параметры процесса колебаний, как амплитуда x m и начальная фаза φ 0 , определяются способом, с помощью которого система была выведена из состояния равновесия в начальный момент времени.
Математический маятник.
Математическим маятником называют тело небольших размеров, подвешенное на тонкой нерастяжимой нити, масса которой пренебрежимо мала по сравнению с массой тела.
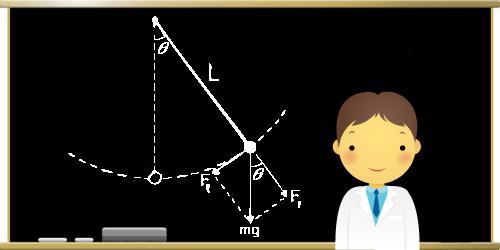
В положении равновесия, когда маятник висит по отвесу, сила тяжести уравновешивается силой натяжения нити N. При отклонении маятника из положения равновесия на некоторый угол φ появляется касательная составляющая силы тяжести F τ = –mg sin φ. Знак «минус» в этой формуле означает, что касательная составляющая направлена в сторону, противоположную отклонению маятника.

Математический маятник.φ – угловое отклонение маятника от положения равновесия,
x = lφ – смещение маятника по дуге
Собственная частота малых колебаний математического маятника выражается формулой:
Период колебаний математического маятника:

Значит, период колебаний математического маятника зависит отдлины нити и от ускорения свободного падения той местности, где установлен маятник.
Свободные и вынужденные колебания.
Механические колебания, как и колебательные процессы любой другой физической природы, могут быть свободными и вынужденными .
Свободные колебания – это колебания, которые возникают в системе под действием внутренних сил, после того, как система была выведена из положения устойчивого равновесия.
Колебания груза на пружине или колебания маятника являются свободными колебаниями.
Для того, чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению .
В реальных условиях любая колебательная система находится под воздействием сил трения (сопротивления). При этом часть механической энергии превращается во внутреннюю энергию теплового движения атомов и молекул, и колебания становятся затухающими .
Затухающими называют колебания, амплитуда которых уменьшается со временем .

Чтобы колебания не затухали, необходимо сообщать системе дополнительную энегрию, т.е. воздействовать на колебательную систему периодической силой (например, для раскачивания качели).
Колебания, совершающиеся под воздействием внешней периодически изменяющейся силы, называются вынужденными .
Внешняя сила совершает положительную работу и обеспечивает приток энергии к колебательной системе. Она не дает колебаниям затухать, несмотря на действие сил трения.
Периодическая внешняя сила может изменяться во времени по различным законам. Особый интерес представляет случай, когда внешняя сила, изменяющаяся по гармоническому закону с частотой ω, воздействует на колебательную систему, способную совершать собственные колебания на некоторой частоте ω 0 .
Если свободные колебания происходят на частоте ω 0 , которая определяется параметрами системы, то установившиеся вынужденные колебания всегда происходят на частоте ω внешней силы .
Явление резкого возрастания амплитуды вынужденных колебаний при совпадении частоты собственных колебаний с частотой внешней вынуждающей силы называется резонансом .
Зависимость амплитуды x m вынужденных колебаний от частоты ω вынуждающей силы называется резонансной характеристикой или резонансной кривой .

Резонансные кривые при различных уровнях затухания:
1 – колебательная система без трения; при резонансе амплитуда x m вынужденных колебаний неограниченно возрастает;
2, 3, 4 – реальные резонансные кривые для колебательных систем с различным трением.
В отсутствие трения амплитуда вынужденных колебаний при резонансе должна неограниченно возрастать. В реальных условиях амплитуда установившихся вынужденных колебаний определяется условием: работа внешней силы в течение периода колебаний должна равняться потерям механической энергии за то же время из-за трения. Чем меньше трение, тем больше амплитуда вынужденных колебаний при резонансе.
Явление резонанса может явиться причиной разрушения мостов, зданий и других сооружений, если собственные частоты их колебаний совпадут с частотой периодически действующей силы, возникшей, например, из-за вращения несбалансированного мотора.
Математическим маятником называют тело небольших размеров, подвешенное на тонкой нерастяжимой нити, масса которой пренебрежимо мала по сравнению с массой тела. В положении равновесия, когда маятник висит по отвесу, сила тяжести уравновешивается силой натяжения нити При отклонении маятника из положения равновесия на некоторый угол φ появляется касательная составляющая силы тяжести F τ = -mg sin φ (рис. 2.3.1). Знак «минус» в этой формуле означает, что касательная составляющая направлена в сторону, противоположную отклонению маятника.
Если обозначить через x линейное смещение маятника от положения равновесия по дуге окружности радиуса l , то его угловое смещение будет равно φ = x / l . Второй закон Ньютона, записанный для проекций векторов ускорения и силы на направление касательной, дает:
![]()
Это соотношение показывает, что математический маятник представляет собой сложную нелинейную систему, так как сила, стремящаяся вернуть маятник в положение равновесия, пропорциональна не смещению x , а
Только в случае малых колебаний , когда приближенно можно заменить на математический маятник является гармоническим осциллятором , т. е. системой, способной совершать гармонические колебания. Практически такое приближение справедливо для углов порядка 15-20°; при этом величина отличается от не более чем на 2 %. Колебания маятника при больших амплитудах не являются гармоническими.
Для малых колебаний математического маятника второй закон Ньютона записывается в виде
![]()
Таким образом, тангенциальное ускорение a τ маятника пропорционально его смещению x , взятому с обратным знаком. Это как раз то условие, при котором система является гармоническим осциллятором. По общему правилу для всех систем, способных совершать свободные гармонические колебания, модуль коэффициента пропорциональности между ускорением и смещением из положения равновесия равен квадрату круговой частоты:

Эта формула выражает собственную частоту малых колебаний математического маятника .
Следовательно,

Любое тело, насаженное на горизонтальную ось вращения, способно совершать в поле тяготения свободные колебания и, следовательно, также является маятником. Такой маятник принято называть физическим (рис. 2.3.2). Он отличается от математического только распределением масс. В положении устойчивого равновесия центр масс C физического маятника находится ниже оси вращения О на вертикали, проходящей через ось. При отклонении маятника на угол φ возникает момент силы тяжести, стремящийся возвратить маятник в положение равновесия:
|
M = -(mg sin φ) d . |
Здесь d - расстояние между осью вращения и центром масс C .
|
|
|
Рисунок 2.3.2. Физический маятник |

Знак «минус» в этой формуле, как обычно, означает, что момент сил стремится повернуть маятник в направлении, противоположном его отклонению из положения равновесия. Как и в случае математического маятника, возвращающий момент M пропорционален . Это означает, что только при малых углах, когда, физический маятник способен совершать свободные гармонические колебания. В случае малых колебаний
![]()
и второй закон Ньютона для физического маятника принимает вид
где ε - угловое ускорение маятника, I - момент инерции маятника относительно оси вращения O . Модуль коэффициента пропорциональности между ускорением и смещением равен квадрату круговой частоты:

Здесь ω 0 - собственная частота малых колебаний физического маятника .
Следовательно,

Более строгий вывод формул для ω 0 и T можно сделать, если принять во внимание математическую связь между угловым ускорением и угловым смещением: угловое ускорение ε есть вторая производная углового смещения φ по времени:
![]()
Поэтому уравнение, выражающее второй закон Ньютона для физического маятника, можно записать в виде
![]()
Это уравнение свободных гармонических колебаний.
Коэффициент в этом уравнении имеет смысл квадрата круговой частоты свободных гармонических колебаний физического маятника.
По теореме о параллельном переносе оси вращения (теорема Штейнера) момент инерции I можно выразить через момент инерции I C относительно оси, проходящей через центр масс C маятника и параллельной оси вращения:
![]()
Окончательно для круговой частоты ω 0 свободных колебаний физического маятника получается выражение:

С криншот квеста про определ ить планеты










